第一版 (2024.12 - 2025-2)
R1宇树Go-m8010电机组成的连杆机构(用于完成抛投动作),侧置驱动云台。 底盘为4*T-Motor U10内嵌全向轮,具备电动起跳能力。
- miniPC仅作LIO处理、与下位机Stm32通过虚拟串口连接,传输位置数据
- Stm32h723运行FreeRTOS,同时进行整车运动控制和电机通信
- 自主设计rs485-uart转换模块、下位机stm32分控板PCB
第二版 (2025.3 - 比赛)
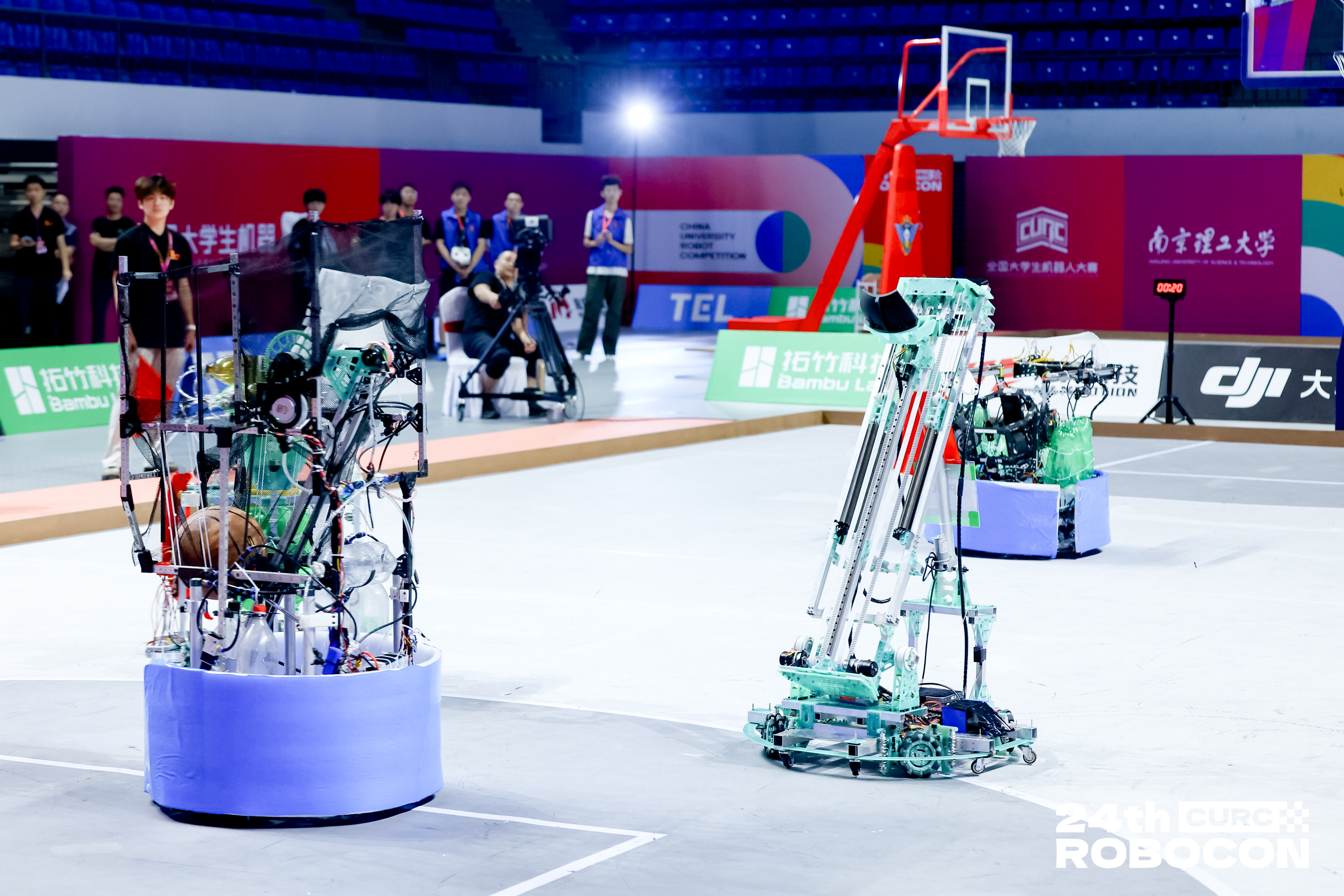
对R1整车重构改为中空车,目的在于实现投运扣全功能,重扣篮。 底盘为3*全向轮底盘,具备气缸起跳能力。
stm32固件开发
- 基于HAL,在C++20标准下开发
- 中断安全缓冲区
- 对象延迟加载
- USB FS通信Bulk模式传输自定义帧
- xmake构建 arm-none-eabi编译 Ozone调试
上位机开发
- 采⽤ubuntu 20.04的miniPC作为机器⼈上层主控
- 上层运算部分在ROS C++节点下运⾏
- 安装preempt_rt实时内核补丁,优化实时性
基于上位机主控的这一方案支持使⽤rviz/rqt_plot等的可视化⼯具大大提升整车的调参效率、简化了LIO节点与控制节点之间的通信维护(话题通信)。
R2投篮自瞄方案
初期使⽤物理⽅法解算篮球轨迹,效果不佳:机器人机构的很多自身影响参数难以测得。 后对投篮数据进⾏拟合。采集投篮电机速度、俯仰⻆、机器⼈位置等数据,使⽤Matlab进⾏多项式函数拟合。
R1扣篮动作